

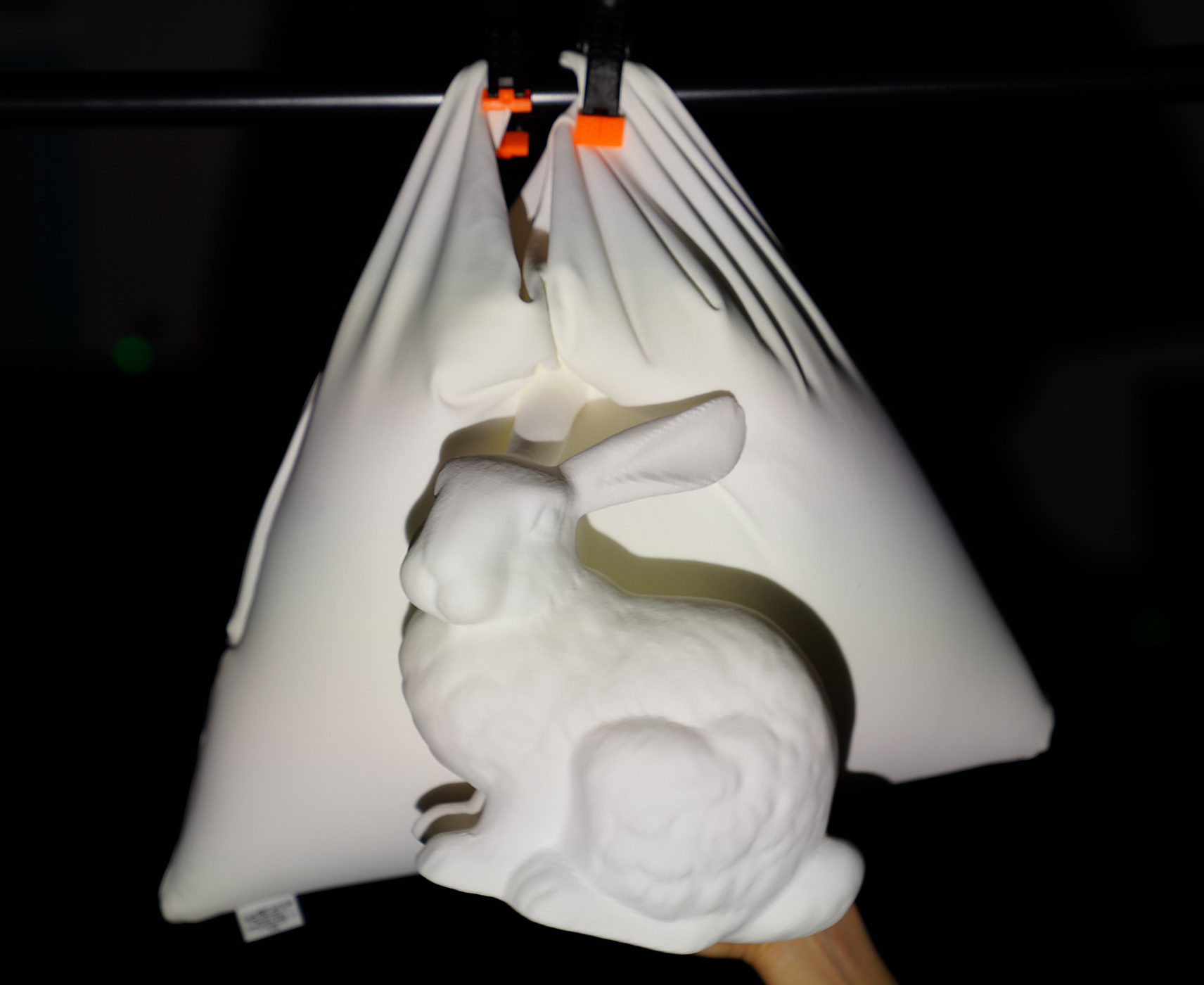
ダイナミックプロジェクションマッピング(DPM)は,特定の対象物に限定されるのではなく,環境全体の外観を変容させることが求められる. また,対象物にマーカをつけることなく,実現することが求められている.このようなDPMを達成するためには,シーンの深度の高精度かつ高速な取得,ミリ秒オーダーのマーカレス3Dトラッキング,テクスチャマッピング領域とそれ以外の領域へのシーン分離,各領域ごとのグラフィックスレンダリング,それらの映像の混合と低遅延投影が必要である. しかし,市販の深度センサを用いたシステムでは,DPMの要件を満たす速度で深度センシングと3Dトラッキングを実現できないため,このようなDPMを行うことは困難であった.
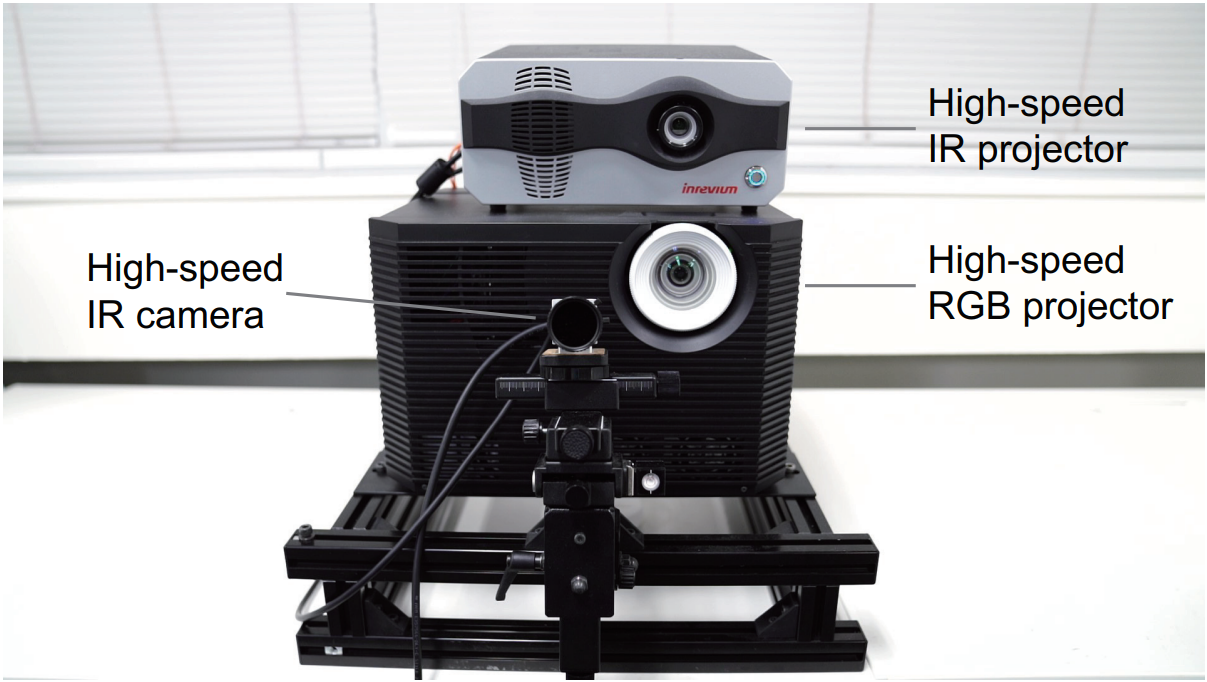
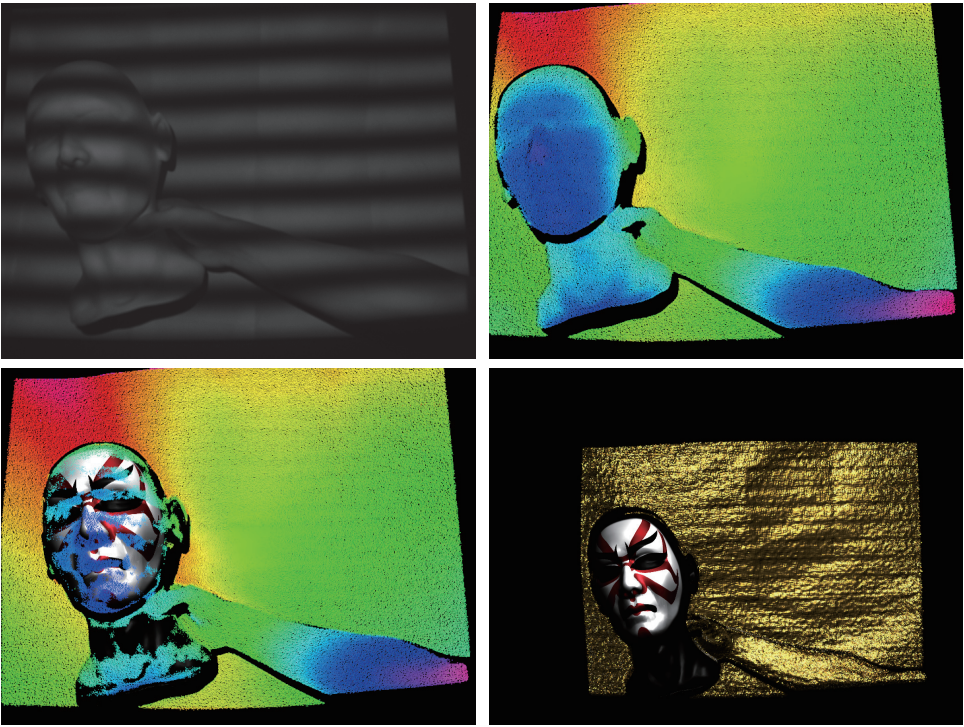
そこで本研究では,947fpsの24bit高速RGBプロジェクタ,500fpsの高速IRカメラ,そして新たに開発した2,880fpsの8bit高速IRプロジェクタを組み合わせた新しいDPMシステムを報告する. また,高速な構造化光法に基づいて取得した深度情報を用いて,高速なモデルベーストラッキングを提案する. 本手法はフレーム間運動が微小であることを利用して,約0.4msの処理時間でトラッキングを行うことができる. 提案システムは,シーン全体に対して深度情報に基づくDPMを約8.0msの遅延で達成するものである.
新たに開発されたRGB+IRプロジェクタを導入することでシステムの小型化も予定している.





参考文献
- Sora Hisaichi, Kiwamu Sumino, Kunihiro Ueda, Hidenori Kasebe, Tohru Yamashita, Takeshi Yuasa, Uwe Lippmann, Petra Aswendt, Roland Höfling, and Yoshihiro Watanabe. 2021. Depth-Aware Dynamic Projection Mapping using High-speed RGB and IR Projectors. In SIGGRAPH Asia 2021 Emerging Technologies (SA ’21 Emerging Technologies:), December 14-17, 2021. Tokyo, Japan